The Matrix Evolution 2007 is the latest brushless controller / system from NOSRAM - a reworking of last years Matrix Evo. This latest version, the so called '2007' model is what the team drivers were using at the big events last year. Other than a sticker pronouncing the fact, there is little to distinguish the 2007 edition from earlier controllers. The improvements are small but significant - and aimed squarely at the racing market.
The Hardware changes are:
Larger external capacitor - Cooler running
'Revised internal components' - Improved 4-Cell operation
Software is the biggest change, and some of the new features are:
Improved XPS2 - this is the various 'power profiles' for brushless motors. 8 profiles can now be set instead of the previous 6, for finer adjustments.
The profiles 1-8 are progressively more aggressive as the number gets higher. Profiles 1-2 are recommended for 2WD, 1-4 for 4WD buggy and the highest settings for Touring cars as you'd expect.
Improved push brake - Improved brakes, with lower motor and ESC temperatures.
Improved automatic brake - More precisely adjustable drag brakes with improved maps.
Internal Temperature check system - A unique feature which stores the maximum temperature that the ESC reached during the last run, so you can see how close (or not) to a thermal shut down the unit was.
Launch Control - only really useful for high grip situations, gives maximum power off the start line.

 |
Nosram is an old name in the world of R/C racing - harking way back to the 1980's when many top drivers in Europe won big races for the brand. The name Nosram, if you wondered, comes from the founders surname - Marson, cleverly reversed as you might have already guessed. Nosram faded from the limelight for various reasons but in 2000 LRP stepped in and took over the running, bringing their unsurpassed technology to the Nosram brand. 
Neil Cragg won the 2WD World Championships for the 'new' Nosram in 2005 and Peter Pinisch took a great win at the European Championships in 2006, using a pre-production version of this same 2007 Matrix Evolution brushless system. |
I actually got to test this same system last year at the Off Road European Championships in Austria, courtesy of Jurgen Lautenbach of LRP - Though the system has been finalised and refined since then.
One thing was clear at the 2006 European Championships - that Brushless had finally arrived! - 4WD in particular was a motor killer at this track, some motors could be seen going into melt down on their first run from new in the hot temperatures. |
 |
 |
 |
| Jurgen came to the Euros to support his team drivers and anyone using his products - the main focus was on brushless however, and in 4WD brushless seemed to be what was needed to win. |
Jurgen was using this specially adapted charger to check his teams brushless controllers - plugging their receiver leads directly into the side. |
A one - two for Nosram at the Euros, Peter used the Matrix 2007 brushless with fan, whilst Neil Cragg used traditional Brushed electrics. |
The Nosram Matrix Evolution 2007 comes in a windowed cardboard box containing all the things you'll need to get going - even down to the double sided tape and zip ties.
An instruction sheet is supplied in English along with a red supplementary sheet detailing the "2007 Edition" changes. |
 |
 |
 |
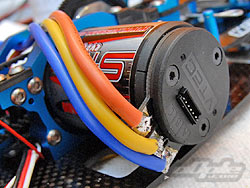
Once plucked from its cardboard sheath the striking thing is just how many wires are coming out of this thing - and the length! The power and motor wires are huge so should reach as far as you'd need in almost any racing class - and can of course be cut to the desired length.
Being a brushless controller, the Matrix Evo 2007 has three motor wires rather than the usual two.
A large power capacitor is pre-soldered in place to give extra punch and keep the ESC cool during operation.
The usual switch and receiver wire are there, along with a 7.2v servo wire for the now relatively uncommon 7.2v KO servos. |
Since the Matrix is a sensored system it requires something called a "hall sensor wire" for brushless operation. This wire isn't included with the ESC, which seems strange, but is included with the Nosram and LRP motors. Other motors which might work with this ESC may or may not include the sensor wire.
The sensor wire provides feedback on the rotor position and enables the smooth operation of throttle and brakes without 'cogging'. Cogging is the undesirable effect when the rotor hesitates for a fraction of a second during acceleration or braking. |
|
The ESC isn't the smallest unit around but in terms of brushless controllers it's not bad with a foot print of 33x38 and 15mm high. This height is almost doubled however when you add the included heatsink. The heatsink isn't mandatory but recommended for best performance.
If you want the tallest ESC possible (?!), you can also purchase the optional 'cooling set' which includes a fan to sit atop the heatsink! |

New for 2007 is the Storm Evolution brushless motor, based on the vector X-11 brushless from Nosram. This is the latest generation of motors with many changes from earlier X-9 designated motors.
The smallest change would be the name - gone is the 'star rating', to be replaced with the number of turns used. Some manufacturers use a KV measurement or the number 'turns' to differentiate between the performance level of motors - so the 'Star' rating was fairly obscure anyway and in need of replacing.
The 5.5 I'll be using would be the same winding as the older 4-Star motor. This is the fastest 'bonded' rotor X11 motor that Nosram produce, spinning at 8100rpm per volt, or 58,320rpm for a 7.2v pack.
Needless to say, this is MORE than enough motor for off road, and certainly too much to use in a 2WD buggy on most race tracks. Unless you have the thumbs of Neil Cragg of course. |
 |
 |
The X11 motor looks far better than the previous X9, but looks aren't the only changes. The previous generation of motors had a problem with shifting magnets which in extreme cases could lead to the shaft moving out of the motor can completely. Nosram were quick to find a solution by using a larger diameter shaft and larger bearings - the shaft exiting the motor is the same diameter of course, but internally it's been beefed up. This was a running change on the older motor but is of course also used on the new X11 motor.
All the X11 motors, with the exception of the fastest 4.5 turn varieties, come pre-wired with connectors. This is to match up to the connectors on lower spec 'consumer' controller. The Matrix Evolution 2007 being the top-line brushless ESC doesn't come with accompanying connectors, and these connectors aren't really meant for racing but for the convenience of the larger 'fun' market. |
I guess it's good that the connectors are included for the sake of those that need them - but they add another step to the install (removing and discarding).
Thankfully the connectors are soldered to external 'solder tabs' which make it quick and easy to remove and add new wiring. |
|
The previous X9 design had another problem which was quite common, that solder from these tabs could creep inside the motor along the metal contacts which extended all the way inside. Too much prolonged heat could end up causing mayhem inside the motor. The X11 motor appears to have solved the solder creeping issue since there is no longer bare metal extending into the motor can, so soldering should be a little less troublesome. Nosram recommend you solder for no longer than 5 seconds per tab however since there are still delicate components inside which could be damaged. |
 |
The front aluminium cap on the motor can be removed to access the internals and remove the rotor. Being brushless of course there's not much to the rotor - the bonded neodymium magnet is attached to the new design shaft which rides on large diameter bearings at either end.
The only real reason to take the motor apart is to clean and lube the bearings - with nothing else to wear out.
 The X11 motors have 'adjustable timing', a little like that you'd find on a traditional brushed motor. The timing can be changed by turning a plastic ring in front of the solder tabs when the rear cover is loosened - but the manual states that this must be left at the default '2' position when using the Matrix Evolution controller, so I left it well alone. The X11 motors have 'adjustable timing', a little like that you'd find on a traditional brushed motor. The timing can be changed by turning a plastic ring in front of the solder tabs when the rear cover is loosened - but the manual states that this must be left at the default '2' position when using the Matrix Evolution controller, so I left it well alone.
|
 |
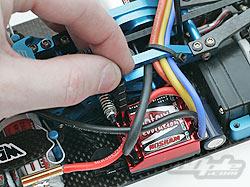
Installing the Matrix Evolution in most cars wont be a problem, but the height with heatsink attached needs considering for body clearance and a suitable location for the controller where it can get a little cooling wouldn't be a bad idea either.
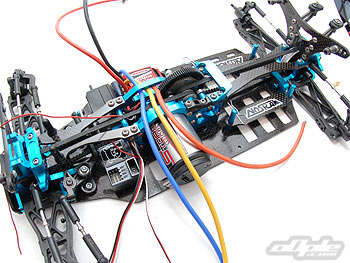
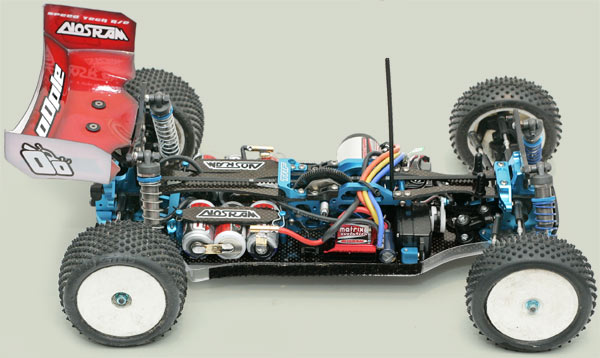
I had plenty of cars to choose from for this review but I chose to test the system in the Tamiya 501X 4WD buggy. This is one of the best of the current crop of 4WD buggies, easy to drive and more than capable of handling the power and doing it justice.
I'd already decided that I was combining this review with a new KO low profile servo, this isn't to say that one is needed to install the Matrix Evolution in the Tamiya, but I knew it would help me make a nicer looking install. Indeed, I removed a similar (LRP) brushless system and normal sized servo to install the Nosram for this review. The small servo just looks cool. |
|
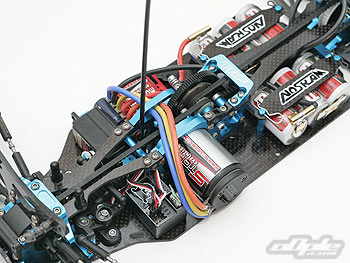 |
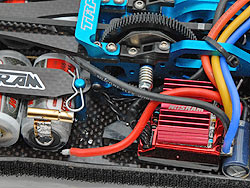
Installing electrics in the Tamiya 501X can be a little messy, with two belts and the central motor / spur gear. Keeping everything tidy is important, especially with an octopus-like brushless system in the mix. I installed the motor first since I would later be placing the Matrix Evo in front of the motor screws, not a problem since there shouldn't be a need to remove the motor regularly - this is brushless after all.
The tamiya has a low-slung body shell with bulges at either side to accommodate the height of the motor and ESC. The solder tabs on the motor however stop the body from sitting down low - again this isn't a problem with the multi-holed front motor cover, which allows you to place the motor at various angles for the best fit. I rotated the motor until the tabs were low down almost touching the chassis. Finally once I'd worked out a route for the wires, I was able to cut and solder each one in turn for a nice neat install. |
Setting up the Matrix Evo system is pretty simple - with the car suitably immobilized (sat on a box in my case) and transmitter switched on and ready to go - you turn the Matrix on and then hold the SET button with the provided plastic tool for three seconds. A blue LED should flash to indicate you are in 'setup mode'. Leaving the throttle on the transmitter in neutral, one press of the SET button stores the neutral and a yellow light begins to flash. Full throttle is next with another press of the set button, and once more for the full brakes. And that's it - ready to go!
Once the unit is set up for your transmitter its time to take a look at some of the more 'advanced' features available. There are four 'modes' and these each control a different aspect of the controllers settings. Pressing and holding the MODE button for three seconds takes you into the programming mode - you can move forward through the different modes by pressing the MODE button once, or pressing the SET button will change the setting, moving the value up one until it loops back around.
The modes are as follows:
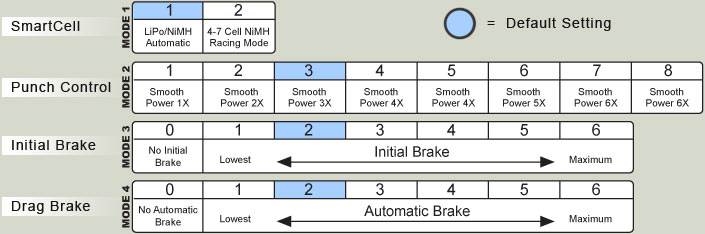
Mode 1 comes set as default to the LiPo safe mode which should prevent damage to these delicate packs. For racing with NiMH cells it's best to change this to the second setting.
I didn't want to get too heavily into changing what, by default, should be pretty good settings for the majority of people. I did however have a play around with the punch settings (Mode 2), trying to get my car wheelying in the kitchen isn't ideal. Holding the car in my hands it was hard - or impossible, to tell the difference in the settings. The car would spin the wheels right up to full speed no matter if it was in the smoothest or most aggressive profiles. I didn't think too much more about it but set the ESC to the first, and allegedly smoothest profile, since I knew I'd be racing in wet conditions. I left the brake settings as-is. |
TEST
I went to test the system at a Bury Metro North West Regional meeting. The last time I'd looked at forecasts about 14mm of rain was predicted, and there was certainly a heavy downpour on the way to the track, but on arrival the conditions were only damp - with no standing water.
In practice I was initially disappointed, as despite the speed of the Matrix Evo & 5.5 motor combo I still wasn't able to clear the new double at the top right hand corner of the track. This is actually a triple but the first jump isn't big enough to send you over the next two unless you had a long run up. Instead the start of the triple was just after a corner, so rolling the first and getting the power down to clear the next two was the fastest way.
I was no-where-near clearing this and I couldn't understand it - the system felt so powerful in my hands but wasn't able to power over this relatively small obstacle which most people seemed to manage quite fine.
I had a look at the power settings - from memory it was easy to remember the very simple process to enter the programming mode and change settings. I was set to power level 1 from the previous days testing, the lowest and smoothest setting. I had just gone for the easiest and safest option - I'm pathetic I know :)
I went out to practice just the double, but this time with the setting tool in my pocket. After a couple more failed attempts I went straight to power level 3 (the default setting from the factory) and the difference was amazing - still very smooth, still just the same speed, but this time when I needed the extra power to clear that one obstacle it was available almost seamlessly. I seriously couldn't tell the difference around the track, only on that one jump where I needed the power did the car feel different.
After four qualifiers I'd only managed 4th on the grid - a little disappointing but I'd struggled to find a balance on the car all day. I still had the fastest laps in some of my qualifiers so I knew I could do better, but the consistency wasn't there. Finally after a little setup advice I got the car dialed just in time for the final.
The Final:
From 4th on the grid I set my car up at a slight angle, aiming for the middle of the track and hoping I could power past the three in front. I'd been telling my good friend John how I'd kick his ass on the straight with the Nosram, though I didn't really believe it - I never have the fastest car on the track. But that's exactly what happened, sort of. At the buzzer I tore off quickly passing 3rd and 2nd, coming to pass my team mate John Price in first after only a few feet (this thing was seriously quick off the mark)- John veered in front of me (honest) and we ended up tumbling and in joint last place - a true nightmare of a start.
Some hard racing enabled me to claw past John but I was well down from the leaders. The next 9 laps were fantastic and I was the fastest car on the track, the 5.5 brushless just felt the perfect choice despite my fears it would be 'too fast', it was just right. I managed to catch, pass, and pull a gap on the other cars in my final - it wasn't to last however and a lap from winning my first regional I rolled the car still pushing hard despite the large gap in my favour - the car stopped dead.
Initially I thought the Corally plug had just become disconnected, but I got the shout back from the marshall that it hadd de-soldered itself. I still managed to finish 3rd, but I was really disappointed to have missed out on my first regional win.
Count those flashes!
One unique and very useful feature of the Matrix Evolution 2007 is the Internal Temperature-Check system. This allows the racer to get feedback from the ESC as to how close, or not, the system was from shutting down due to overheating.
To use the feature you need to tell the controller to save the settings after a race, and this is achieved by briefly applying the brakes before you or your pit-man turn the car off.
To 'read' the resulting warning signs you simply press and hold the MODE button before turning the switch on. As long as you did everything correctly the ESC should start flashing the blue led. At 5 flashes the ESC will shut down, so the more flashes the better - the flashing will pause and restart so you can count again if you got lost with your counting - dummy.
Every flash over the first five is equal to 8 degrees from a thermal shutdown - so 10 flashes means you were 5 x 8 = 40 degrees under the 'thermal'.
This is a really cool feature as it means you can adjust things on the car like gearing or airflow to lower the temperature of the system BEFORE it becomes a problem. It can also give you peace of mind to know your car is a long way from over heating if that's the case.
I had tried to get temperature settings from the system all day but I found it hard to remember to use the brakes at the end of a run before turning the car off. Unless the last 'command' to the ESC was you using the brakes, the temperature setting won't be remembered and I never did manage to get a proper post-race reading during the first race day with the system.
At the next regional I was able to give the system an even better test when I rebuilt the Tamiya quickly - putting the rear top deck on over the belt rather than under it, giving more than a little drag to the drive train. The system got hot but with 14 flashes there was still plenty of room before the system shut down. In the other rounds of qualifying the system was reading 17 flashes and that's around the number I've had since.

Conclusion:
I've been really happy with the performance of the Matrix Evolution 2007 and X11 5.5 motor. It's superbly smooth and the punch settings are really useful, more so than any I've used before. I initially thought the 5.5 motor would be too much for me, but in the 4WD it felt about right and could be made 'wilder' by turning up the punch a little. On a loose surface or indoors a slower motor like the 6.5 might be a little more suited.
The motors aren't cheap, so I can see it's tempting for people to buy a system like this with the fastest motor possible - the perceived value of a quicker motor being hard to resist. A boost for the car spare-parts business I suppose..
This summer has shown one weakness with this system - and that's the fact it's not waterproof. In the extremes of weather we seem to like to run our cars in (at least in the UK), waterproofing is a desirable feature. There are some ugly fixes which include covering the end of the motor, sensor wire and holes on the front of the ESC with bluetack to try and prevent water ingress. I have run in some very wet conditions with the Nosram and despite getting a little water on the outside of the case I had no problems.

|

|
| Brushless isn't quite the 'must-have' to win just yet - but once you've tried the Nosram Matrix evo 2007 or similar LRP system, it's hard to go back. |
| I'm finishing this little review as I prepare for the 2007 European Championships where no doubt Jurgen will have some more podium positions - I know I'll not have to do anything to my 4WD and the only reason I'm running brushed technology in my 2WD is becasuse I don't have a motor slow enough! |

|