|
||

|
|
||||||||||||||||||
|
#182
 14-02-2013
14-02-2013
|
||||
|
||||
|
Yes the spacer wears and that causes the bearing to brake down due to the pressure
Take a look in the Durango section fit the new hardened spacer And some associated slipper pads your bombproof . But otherwise my 210 diff and gears have been some of the best and most reliable I have run Things may wear over time but nothing fails horribly and expensively Good choice
__________________
B6.1 
|
|
#183
21-02-2013
|
||||
|
||||
|
Thanks for the details guys
 It's good to hear that the 210 gearbox is as durable as it is adjustable (as long as I keep that spacer in check). And I'll switch to AE pads then when the Durango ones are worn down... Do they fit the Durango spurs? It's good to hear that the 210 gearbox is as durable as it is adjustable (as long as I keep that spacer in check). And I'll switch to AE pads then when the Durango ones are worn down... Do they fit the Durango spurs?  Anyway, I've got some progress to share with you...        A mockup of the front end!  I made this mainly to find out if there are any issues around the driveshafts+outdrives - after all the outdrives are pretty short, so there's not much room to play with. I made this mainly to find out if there are any issues around the driveshafts+outdrives - after all the outdrives are pretty short, so there's not much room to play with.The current setup is a tad narrow (just under 240mm) - and I need to find a way to get the Tamiya 1.5mm outdrive pins to work in the 2.5mm Durango outdrives. However, it does work fine otherwise, and these particular Tamiya CVDs have an impressive operating angle that's much smoother at extreme angles than the CVDs the current proto uses. I am going to look at the Xray XB4 driveshafts, as these may add a nice 8mm to the width of the car (if the axles are the same length as the Tamiya ones) - plus, they seem to have the 2.5mm outdrive pins. As for the rest of the geometry, it seems to function very nicely and seems accurate with the CAD model. It has comparable suspension travel to my TRF201's rear end, the ackermann angle is nice, the camber gain is comparable to other 2WDs and can be adjusted nicely. The only problem I found was that on full steering the outside tire is awfully close to the damper, and the inside tire is too close to the chassis. The XB4 driveshafts may solve this, and if it doesn't I think I can get away with carving the front piece of the chassis in a slightly different shape and putting the damper mounting holes on the suspension arm just slightly to the inside. So all in all, with small tweaks I could use this front end But before I do I'm taking a peek at those XB4 driveshafts!
|
|
#184
21-02-2013
|
|||
|
|||
|
Quote:
|
|
#186
21-02-2013
|
||||
|
||||
|
Thanks for the advice Cream
The tower design came to existance when I heard so many stories of 210 shock towers (even carbon ones) breaking because the tower hits the motor plate in a crash. I know I could hack off the top mount for the gear cover or even shim the shock tower backwards a little, but I do kind of fancy the 'buffalo' look that the tower ended up with  Kidding aside though, durability has priority. It's good you're mentioning it because I didn't really look into the clearance and durability of the front tower. There is a load of room for the shock tower to flex, much more than I expected and more it would ever need I think. I can probably get away with increasing the radius to 4-5mm (it's currently 2mm). Is that sufficient or do you think I need to do more to it (or take a different approach to it)?
|
|
#187
21-02-2013
|
|||
|
|||
|
As long as it clears the motor plate it should be fine. Just looking at it I'd have thought you would get away with about 10mm rad, I'd also look at the corner above and put a rad in there too. Corners create fracture points.
|
|
#188
22-02-2013
|
||||
|
||||
|
loving the mock up , nice to see the development from the cad drawings. as to the shock tower i gotta agree with cream , something stronger may be better suited, maybe just make it a bit bigger so there is more material to take the impact . looking good though,keep up the good work
__________________
B6.1
|
|
#189
22-02-2013
|
|||
|
|||
|
Quote:
It tends to happen when the car is upside down and the tips of the tower snag on the ground then drive the tower into the lug on the motorplate. Or just snap it off. I just can't see you getting that much load to the front tower as easily as you do on the 210. I'd make the rad as big as i could.
|
|
#190
25-02-2013
|
||||
|
||||
|
Good point on the direction of the car with which the tower may 'dig' into the ground. The bodyshell shouldn't be a protecting feature for the rest of the car though, and it isn't: It's lower than the front tower (ok, I admit it, only by 5mm
)Anyway, I've updated a few things on the design. First of all, the shock tower:  I got rid of the sharp corners in the tower, as well as adding more material to the tower towards the center to reinforce the construction. Keen eyes may also spot I added two mounting holes in between the existing 3 holes I had. I also moved the holes slightly further to the center of the car - this means that the inside hole is only accessible when using small bore shocks, but with small bore shocks the damper can be placed that bit more diagonally. I had a look at the Xray XB4 CVDs, however, they are actually shorter than the Tamiyas (strange being that they actually say '68mm'), and the head that goes in the outdrive has too big a diameter to fit. So, TRF201 Driveshafts it is! This meant I could could go to the job of tweaking the front suspension arms a bit. First of all, the suspension arm is 0.5mm longer for extra width and a bit of extra clearance that's needed between diff nut and driveshaft. Another 0.5mm was added to this length so the driveshaft can be shimmed 0.5mm inward, reducing wheel offset just a tiny bit Lastly, the lower suspension mounts on the front end have been moved 2.5mm to the inside. This is to solve a small binding issue between the tires (especially ones with fat walls, like Proline caliber tires) and (big bore) shocks on the extreme steering angles. The 2.5mm to the inside, plus 1mm extra length of the arm, should solve this with a bit of a safety margin.There is some important detailing work left to go, but this is another step in the direction of a working prototype
|
|
#191
25-02-2013
|
|||
|
|||
|
Excellent work as always ... makes for good reading and I really wish I had your cad skills !!
Just one thing, I would have said that the shocks on the front would make for better front end control if they were mounted as far out as possible, looks like they are pretty close to the tyres on full lock but if they were cut into the wishbones a little, closer to the driveshafts that might help ...
|
|
#192
25-02-2013
|
||||
|
||||
|
Thanks
Very nice suggestion by the way, I didn't think of that! It really adds to the adjustability of the front suspension, which is always nice. However, I do need to make sure the front suspension arm has enough width to ensure it's rigid and strong enough - perhaps I can make a mounting slot in the arm instead of on the side of the arm
|
|
#193
26-02-2013
|
||||
|
||||
|
I really havent read the complete thread, hence the reason of my question/suggestion;
Is that drivetrain is meant for offroad? Becuase if is meant for off-road you are going to have some serious with heavy nose dives, been there, done that. I did something very similar to your, but mine had the motor facing backwards with reverse rotation, the turck handled very good, terrific turns, but evrytime was jumping time... catastrophic!!!! No matter how much power, the truck simply nose dive. Anyways goodluck, seems very nice done, much better than mines!!!
|
|
#194
26-02-2013
|
||||
|
||||
|
OK, now that I read a couple of the first replies and tittle I know is for off-road.
A suggestion that you should REALLY consider; Dont put more time into that design(front motor). Rotate the transmission 180 degrees and place the motor midships with spur gear and powering a belt to the tranny. That way you might get away with the nose dive and keep the steering servo close for the steering bracket. I remember when I did mine I used NiMH battery it was all the way in the back and it still nose dive like an olimpic champion diver, and yes heavy wheel spin, but since it was a truck not worse than a Maxxum. I am trying to get the Cad drawings and pictures(if I took) of the FF truck I did, I'll post them if I find them.
|
|
#195
26-02-2013
|
||||
|
||||
|
I did not found the pictures, better yet I found the chassis I made for the FF truck.
Ok, now I remeber, I did want to make it with the rear motor, but ended just like you are doing yours. The battery was all the way to the back. The chassis is aluminum, servo was mounted in one of the vertical plates and the two bolts where for the bell crank steering. The receiver was on the double side tape is. Hope this helps, but REALLY consider re-design it!!!! I was AWFUL in the jumps and bad acceleration
|
|
#196
26-02-2013
|
||||
|
||||
|
Thanks for the suggestions and pictures optiman. That chassis you have is nicely narrow, looks cool!
It's a shame you couldn't get it to work well for you.The car is indeed for offroad. And yes, my prototype indeed tends to nose-dive when driven like a RWD Buggy, but... ...I found only one situation where the car reaaally nose-dived. It was when I was using full power to the motor when I was on the ramp - usually in desperation to get enough speed for the jump. The thing is, when that happens the wheels don't spin up up a lot anymore because they were already spinning so quickly with all the wheelspin - this lack of acceleration of the front wheels in air causes the car to nose-dive (in fact, my rear motor RWD buggy shows similar behaviour in those situations). So though it sounds strange, but what I've found is that it's down to driving style/technique: it's essential to prevent excessive wheelspin - it's better for your pace (unless you are running on a surface like loose dirt where tires need to dig in to grip). Preventing wheelspin in general will be good enough to clear jumps in a neat way (all the jumps I've tried, anyway). And just in case you do need to make some serious corrections to the heading of your car, make sure you have some throttle left to play with when you get off the ramp. This means you need a motor that can make those extra spins in mid-air even if you didn't have any wheelspin. The last proto had a 4000kV motor in it - I think it equates to about 8.5-10.5T - and that was fine for a normal length of jump - in fact, I could make it land on it's rear wheels first with that motor: 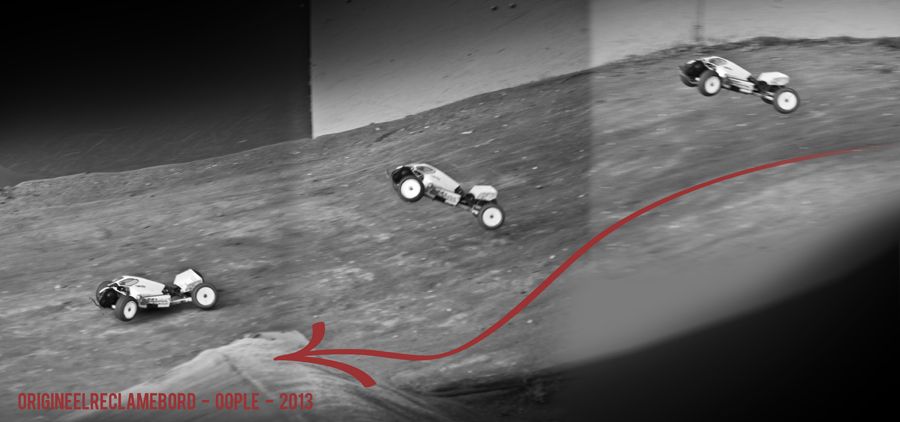 The upcoming proto will run with a 6.5T/5200kV motor, exactly the same brushless set as I run in my RWD. Nice to compare the cars' pace on the track, and with this I can't complain about a lack of power, that's for sure And as another reference, this was a jump at a very modest rate of throttle to clear the 90 degree turn after the jump: 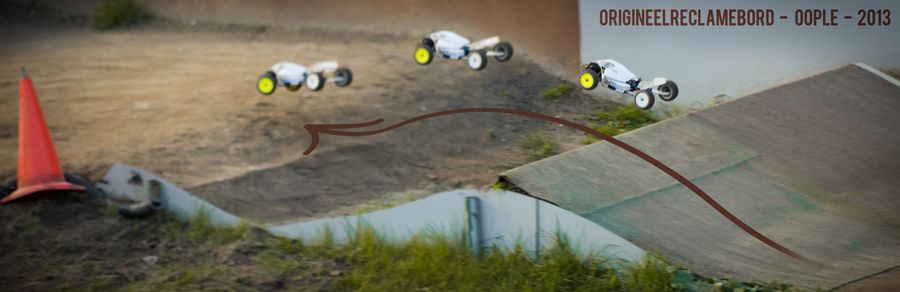
|
|
#197
26-02-2013
|
||||
|
||||
|
Yes, that's exactly what happened to my truck. I had to approach the jumps slower than normal and leave plenty of spare power on the throttle for a good mid air flight and landing. Maybe if I would've had used a brushless motor instead of a brushed the truck would've have behaved way better.
|
|
#198
26-02-2013
|
||||
|
||||
|
Quote:
Like I mentioned, if I desperately try to clear a jump with my RWD and all that the wheels do is spin when going up the ramp, it falls to earth as gracefully as rolling a car off a cliff  However, with the wheelspin of a FWD, this is indeed more apparent and you get in trouble with it way more easily than a RWD because they usually take off like rockets. However, with the wheelspin of a FWD, this is indeed more apparent and you get in trouble with it way more easily than a RWD because they usually take off like rockets.With a brushless setup, you can easily get enough power in the car to make sure you don't have to hold back before a jump to be able to tweak it's stance in mid-air. Then after that all that's needed is to adjust the driving style accordingly: No tire smoke and burning rubber on take-off for competitive lap times Plus, if my theory is correct that the 4-gear setup of the 210 gearbox pushes down on the front wheels on throttle (whereas the 3-gear setup as seen on your chassis and my first prototype pull the chassis out of the suspension), it may also increase the amount with which you can tilt the car backwards with the throttle trigger. It's all theory, but if it's not an improvement I can just use the 3-gear setup. Anyway, back to the chassis you made... Have you tested it much? I'd love to hear more about what parts you used, your findings, perhaps even mods you did based on that? Documentation on FWD buggies is quite scarce so pretty much any info you can give is useful and interesting
|
|
#199
26-02-2013
|
|||
|
|||
|
Quote:
LA231 is found in the exploded diagram on page 30 of 33 in the Kyosho Lazer ZX-5 evo manual. It is described as "for front" on page 31 of 33. Also, LA232 on page 32 of 33 is described as "for rear" in the optional parts section. The pin-to-pin dogbone lengths are listed as 68mm and 65.5mm respectively. They appear to share the same axle LA231-02 (I do not know of a reference to verify this.) Though the manual makes distinction between front and rear, I think this distinction is only based on the buggy location (with no difference between the two but pin-to-pin length.) Based on what I have found on the web, these parts along with Kyosho's LA245 driveshafts and UM510-02 and UM522-02 axles, are all interchangeable. As the number of lines per axle increases, the spacing between the bearing face and the axle cross pin center, increases (relative to the axle with one less line) by about 1mm. I have not measured this to verify. On this topic, the following reference links may be helpful. Measurements http://www.rc10talk.com/viewtopic.ph...=15150&start=0 http://www.tamiyaclub.com/forum/inde...howtopic=50728 Pictures http://www.rctech.net/forum/attachme...d-dsc02070.jpg http://www.tamiyaclub.com/forum/inde...attach_id=7598 Manual Exploded view http://www.cls.eclipse.co.uk/RCCars/...w%20Shafts.jpg Discussions http://www.rctech.net/forum/electric...hread-415.html http://www.oople.com/forums/showthread.php?t=30135
|
|
#200
26-02-2013
|
||||
|
||||
|
Well, to be honest I use the truck for maybe two days of testing. I got so frustrated with it that ditched the whole project very soon. I spend a few hours on design and fabrication and when I got the final result I was quite depressed
 But it was a learning expirience, and it was the best and easiest RC car I had to drive, with the exception of the jumps and from standstill acceleration. The truck was basically made with a Duratrax Evader St donor truck. They are basically Losi parts, A arms, braces almost everything are the same and interchangeable. But it was a learning expirience, and it was the best and easiest RC car I had to drive, with the exception of the jumps and from standstill acceleration. The truck was basically made with a Duratrax Evader St donor truck. They are basically Losi parts, A arms, braces almost everything are the same and interchangeable.You know, now that I think of it, I have a Hybrid stadium truck made from a B44 chassis and T4 parts. The motor is mid positioned and batteries are already on the back. I am going to remove the rear drive shaft and see what happens  Here is a drawing I found of that project I made and pics of the BT4 hybrid truck
|
 |
|
|








 Linear Mode
Linear Mode

